The project is plan to provide accurate pose estimation of TurtleBot by visual-inertial fusion based on extended Kalman filter. The robot state is predicted by IMU measurements and updated with RTABMAP visual odometry by using
The performance is evaluted by comparing 2D trajectory data from wheel encoder odom from TurtleBot, visual odom from RTABMAP package, and visual-inertial odom from robot_pose_ekf package. The data will be recorded by Rosbag and the result will be processed in Matlab.
AR marker is used as a reference as ground truth, the distance between AR markers are measured by tape.
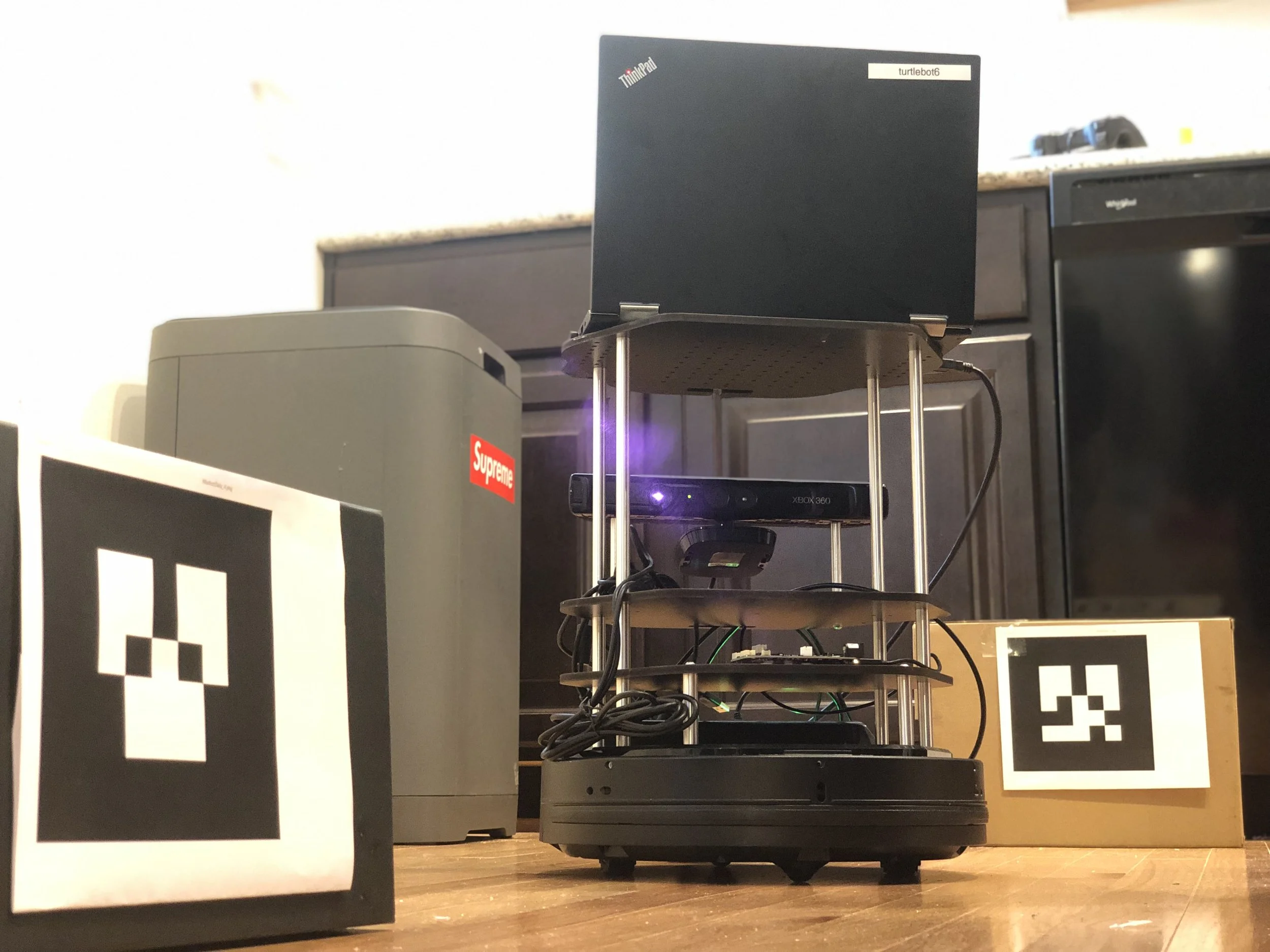
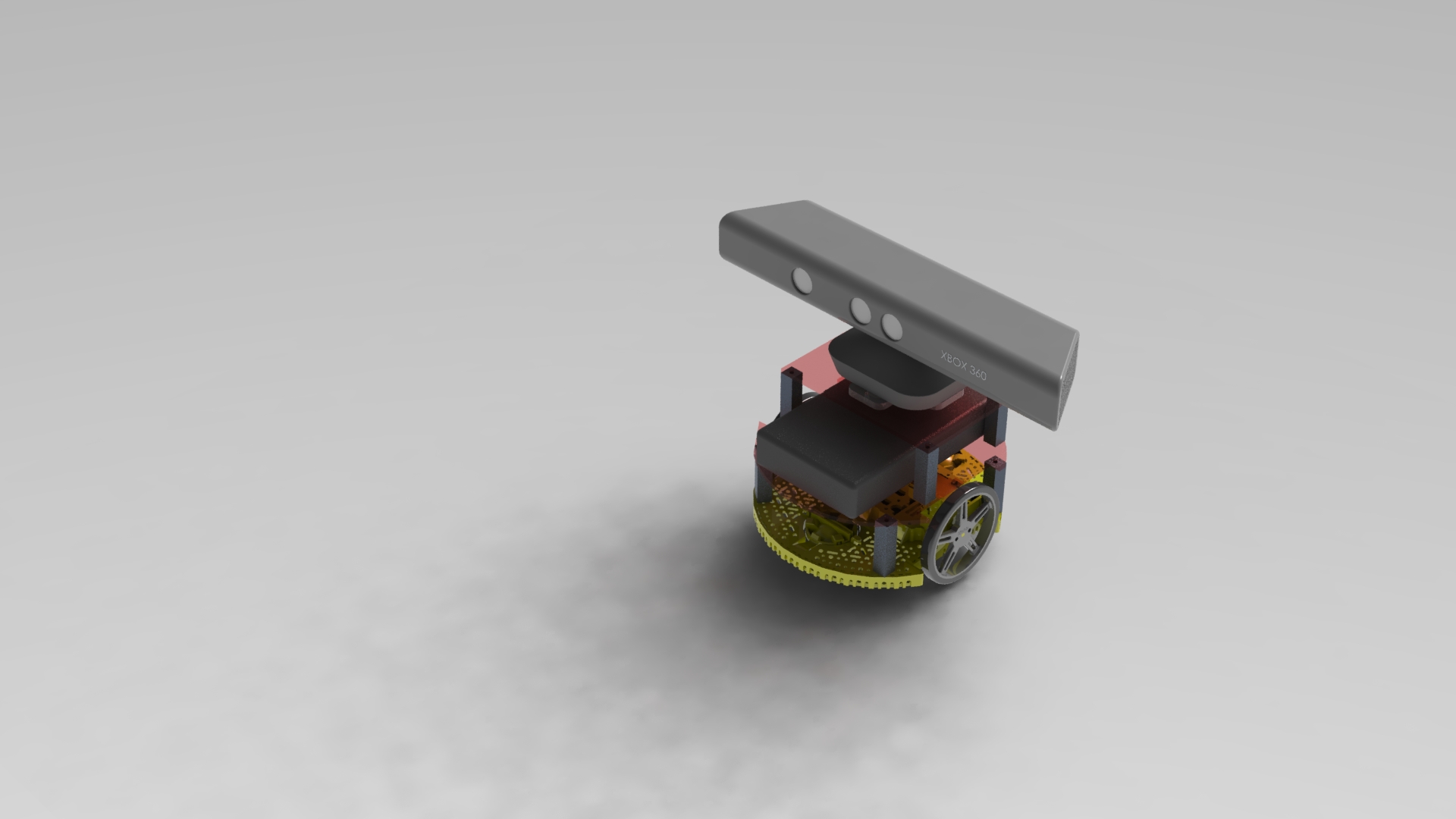
TurtleBot

RTAB-MAP

Block Diagram

Trajectory Comparison
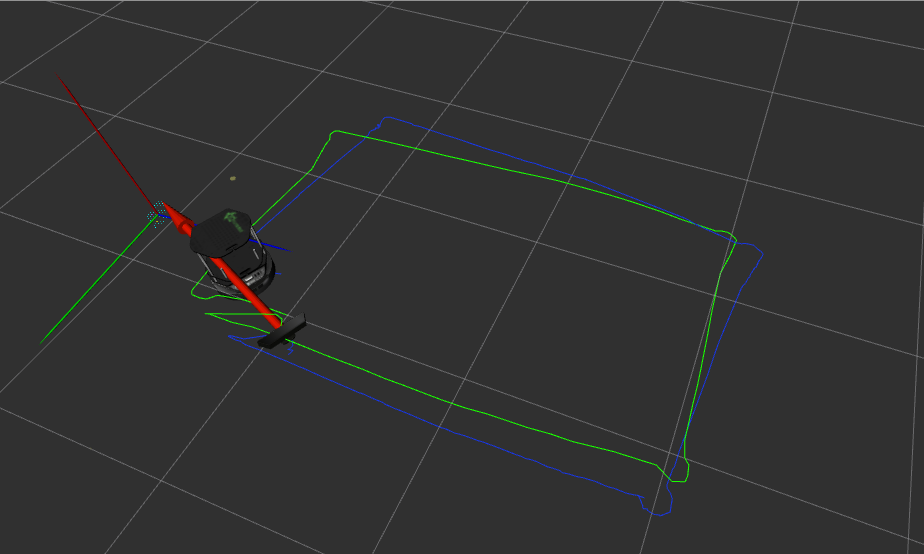
Trajectory in Rviz

Plot of X(t)

Plot of Y(t)

Result of Error