
Background
A ventriculostomy is a device that drains excess cerebrospinal fluid from the head. It is also used to measure the pressure in the head (referred to as ICP, intracranial pressure). The system is made up of a small tube, drainage bag, and monitor. Here is a brief surgical procedure for ventriculostomy refer to Figure 1 below: 1. Incision 2. Hole burred into bone to create opening for catheter 3. Insert catheter and drain excess fluid from ventricle

Technical Approach
Our navigation system work flow diagram is shown as the following figure, and the following steps describe the workflow in detail.
A ZED mini camera mounted to HoloLens to track skull(AR marker) and catheter
Register CT to patient by touching anatomic points (glabella)
Create ventricle model by segmenting CT on PC and import model to Unity
Unity generate AR overlay of ventricle and overlay via HoloLens
Target accuracy within 3 mm
Unity generates entry point by touching and overlay via HoloLens
Display Catheter guide line on HoloLens, which a virtual line from centroid of ventricle to entry point with possibility for entry point adjustment
Catheter tracking result including catheter insertion depth, angle that processed on PC and send to Unity through UDP
Unity receives catheter tracking result from PC and overlay the information via HoloLens

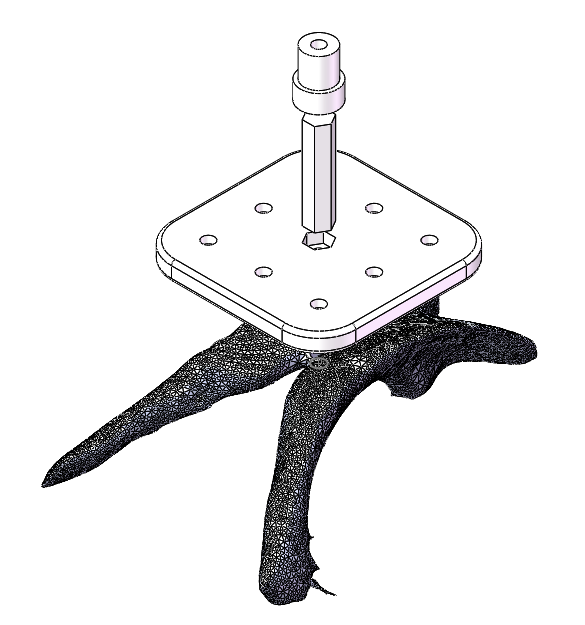
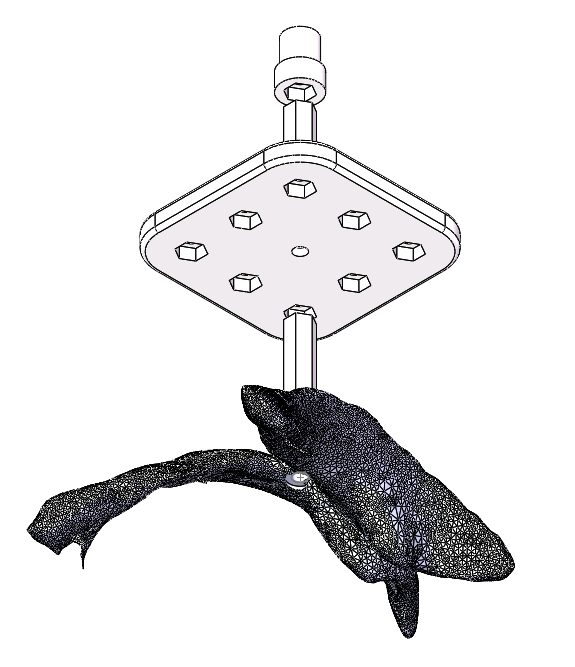
CAD Design

Ventricle Segmentation


Ventricle and Skull segmentation in 3D slicer
Thresholding
Select target object
Close holes
Smooth and mesh
Manually select anatomic point and entry point to get relative position
Software Design
The software of our system mainly consists of two parts, one is on PC, for AR markers tracking and depth sensing, another is running on HoloLens, for registration, AR overlay and UI.


Calibration
Pivot Calibration [1] for the pointer and Display Calibration [2] for OST-HMD overlay.
[1] Yaniv, Ziv. "Which pivot calibration?" Medical Imaging 2015: Image-Guided Procedures, Robotic Interventions, and Modeling. Vol. 9415. International Society for Optics and Photonics, 2015.
[2] Qian, L., Azimi, E., Kazanzides, P., Navab, N.: Comprehensive tracker based dis- play calibration for holographic optical see-through head-mounted display. arXiv preprint arXiv:1703.05834 (2017)

Registration
Based on existing clinical workflow, we designed this Three-Point Registration process to register virtual skull models to its real counterpart. We added another Manual Registration process.

Catheter Tracking
Generate mask Hand color tracking and depth info
Probabilistic Hough transformation to find catheter endpoint
Thresholding based on geometric constraint
Calculate endpoint position and angle of catheter

Experiment


Result


User wear HoloLens to perform catheter insertion on skull phantom 5 times, record the number of time that hit ventricle to evaluate success rate. The score is evaluated by the following criteria:
Ventricle Center: 20
Ventricle: 10
Miss: 0